1 страниц (5 вхождений)
Simple simulation of dynamic systems with optional controller - mb10 - Сообщения
A general purpose, simple ODE solver function that uses Euler integration to simulate (possibly non-linear) multi-inputs dynamic systems, with "embedded" provision for state feedback controller.
In its most general form, the function implements a system of the form:
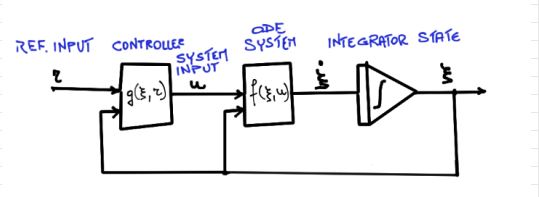
where dot notation indicates time derivative.
A few examples are provided.
DynSys_v01.sm (226,66 КиБ) скачан 1482 раз(а).
In its most general form, the function implements a system of the form:
where dot notation indicates time derivative.
A few examples are provided.
DynSys_v01.sm (226,66 КиБ) скачан 1482 раз(а).
3 пользователям понравился этот пост
Davide Carpi 05.10.2013 09:16:00, Martin Kraska 05.10.2013 20:01:00, Radovan Omorjan 06.10.2013 08:03:00
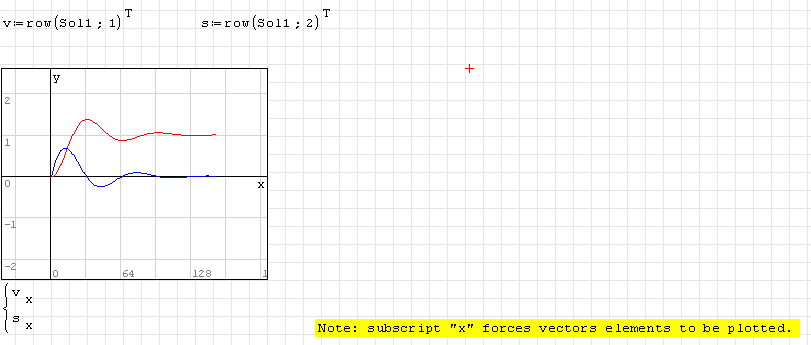
I like the way to plot vectors, was not aware of this.
Technische Mechanik mit SMath Studio: https://link.springer.com/book/10.1007/978-3-658-50592-9
It is an (undocumented?) feature I discovered by chance.
Notice the "staircased" behaviour.
The X-Y plot plug-in has a similar property: in that case it seems that ANY variable name, not just "x", can be used as a subscript to obtain vector plot.
Notice the "staircased" behaviour.
The X-Y plot plug-in has a similar property: in that case it seems that ANY variable name, not just "x", can be used as a subscript to obtain vector plot.
1 пользователям понравился этот пост
Radovan Omorjan 06.10.2013 08:03:00
WroteIt is an (undocumented?) feature.
Not undocumented any more. SVN Activebook updated.
Section 2D plots built-in.sm (36,68 КиБ) скачан 1400 раз(а).
Technische Mechanik mit SMath Studio: https://link.springer.com/book/10.1007/978-3-658-50592-9
2 пользователям понравился этот пост
1 страниц (5 вхождений)
- Новые сообщения
- Нет новых сообщений