AlgLib 3.1x - AlgLib Plugin (based on ALGLIB 3.1x) - Сообщения

Updated. al_nleqsolve() refactored. Try now.
Файл не найден. Файл не найден.
You can also specify only names of the systems (f and j).
Файл не найден. Файл не найден.
Файл не найден. Файл не найден.
You can also specify only names of the systems (f and j).
Файл не найден. Файл не найден.
Russia ☭ forever, Viacheslav N. Mezentsev
4 пользователям понравился этот пост
frapuano 18.07.2018 10:53:00, Fridel Selitsky 18.07.2018 02:35:00, Radovan Omorjan 18.07.2018 05:41:00, Igor Skarine 18.07.2018 10:17:00
2 пользователям понравился этот пост

325 сообщений из 2 052 понравились и 1 не понравились пользователям.
Группа: Moderator
WroteOne example of V. Mezentsev (Uni)
Primer Uni.sm (13,49 КиБ) скачан 1393 раз(а).
Fortunately, I was wrong. We could use it with different number of equations and unknowns.
I just use the Ber7 example and change it with n as a global variable. No need for zeros as non-existing functions.
Primer%20Uni-mod.sm (13,3 КиБ) скачан 1421 раз(а).
When Sisyphus climbed to the top of a hill, they said: "Wrong boulder!"

Thanks a lot uni!
The issue listed in my post #18 has been resolved.
But for some reason simple Newton-Raphson with variable step usually
works better than al_nleqsolve.
The issue listed in my post #18 has been resolved.
But for some reason simple Newton-Raphson with variable step usually
works better than al_nleqsolve.
WroteBut for some reason simple Newton-Raphson with variable step usually
works better than al_nleqsolve.
Can you demonstrate for this application ?
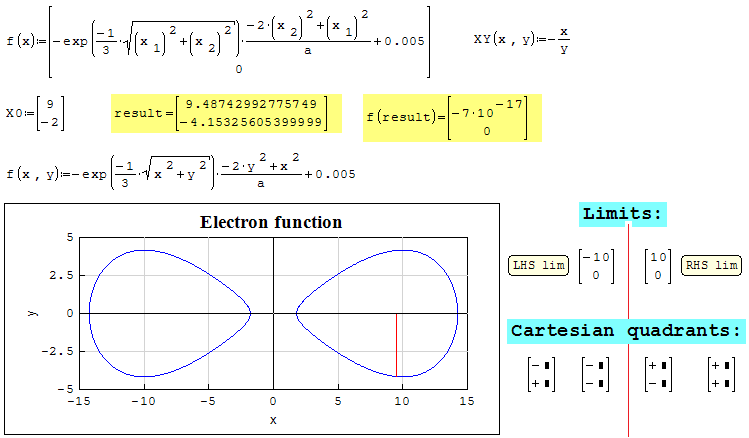
Solve al_nleqsolve-Electron.sm (18,41 КиБ) скачан 1348 раз(а).
We find several roots at once


Primer Uni3.sm (15,93 КиБ) скачан 1345 раз(а).
Primer Jean1.sm (14,78 КиБ) скачан 1313 раз(а).
Primer Uni3.sm (15,93 КиБ) скачан 1345 раз(а).
Primer Jean1.sm (14,78 КиБ) скачан 1313 раз(а).
1 пользователям понравился этот пост
frapuano 21.07.2018 13:44:00

2 пользователям понравился этот пост
Thanks Ber7 for the 3D, nice.
Jean
Jean
Solution of an overdetermined system of equations. The problem is taken from here
https://en.smath.info/forum/yaf_postst12745_How-to-solve-it.aspx

Overdetermined.sm (15,26 КиБ) скачан 1318 раз(а).
https://en.smath.info/forum/yaf_postst12745_How-to-solve-it.aspx
Overdetermined.sm (15,26 КиБ) скачан 1318 раз(а).
1 пользователям понравился этот пост
Andrey Ivashov 26.07.2018 18:06:00

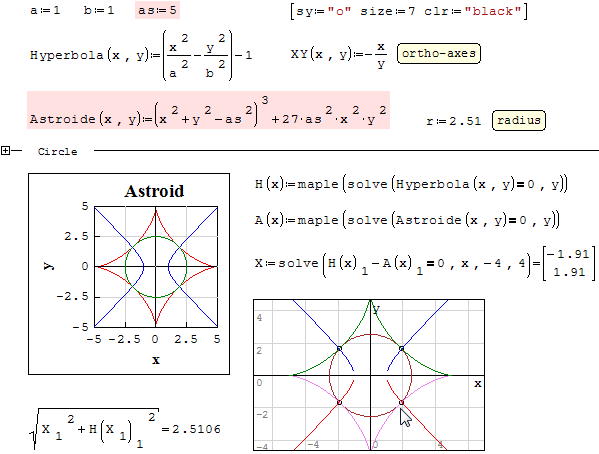
The intersection points of two curves

Primer1b.sm (33,88 КиБ) скачан 1345 раз(а).
Primer1b.pdf (212,69 КиБ) скачан 740 раз(а).
Primer1b.sm (33,88 КиБ) скачан 1345 раз(а).
Primer1b.pdf (212,69 КиБ) скачан 740 раз(а).
Fixed. Now you can find all the intersection points.

Primer2.sm (36,58 КиБ) скачан 1375 раз(а).
Primer2.pdf (215,28 КиБ) скачан 744 раз(а).
Primer2.sm (36,58 КиБ) скачан 1375 раз(а).
Primer2.pdf (215,28 КиБ) скачан 744 раз(а).
2 пользователям понравился этот пост


Simple solutions to two problems
1.The construction of a sphere with respect to four given points
2.The construction of a circle with respect to three given points
To calculate the coordinates of the center and radius using the solver AlgLib
In the first problem, a system of four sphere equations for four given points is solved.
In the second - a system of three equations of a circle and the equation of a plane for three given points.

SphereAlglib.sm (64,36 КиБ) скачан 1338 раз(а).
1.The construction of a sphere with respect to four given points
2.The construction of a circle with respect to three given points
To calculate the coordinates of the center and radius using the solver AlgLib
In the first problem, a system of four sphere equations for four given points is solved.
In the second - a system of three equations of a circle and the equation of a plane for three given points.
SphereAlglib.sm (64,36 КиБ) скачан 1338 раз(а).
1 пользователям понравился этот пост
NDTM Amarasekera 06.10.2018 22:52:00
Hi. The same, but without plugins.
SphereSMath.sm (75,21 КиБ) скачан 1314 раз(а).
Best regards.
Alvaro.
PD: Do you know the angles for your rotation matrix gamma? I get this, but can't put the matrix elements in the correct order nor sign:
Actually, as I know, the minus in the last atan is a mistake, but at least give the same absolute values.
SphereSMath.sm (75,21 КиБ) скачан 1314 раз(а).
Best regards.
Alvaro.
PD: Do you know the angles for your rotation matrix gamma? I get this, but can't put the matrix elements in the correct order nor sign:
Actually, as I know, the minus in the last atan is a mistake, but at least give the same absolute values.
2 пользователям понравился этот пост
WroteHi. The same, but without plugins.
PD: Do you know the angles for your rotation matrix gamma? I get this, but can't put the matrix elements in the correct order nor sign:
Actually, as I know, the minus in the last atan is a mistake, but at least give the same absolute values.
Hi, Alvaro.
Unfortunately, I have never done reverse transformations (gamma-omega).
Your error may be caused by the use of the left coordinate system in Smath- graphs.
I selected the angles for the axial matrices empirically in order to get a good perspective ,using the gamma matrix.perspective.

1 пользователям понравился этот пост
Alvaro 09.10.2018 21:14:00
WroteUnfortunately, I have never done reverse transformations (gamma-omega).
Mathcad solves the Euler angles from a given γ [gamma matrix].
Smath does not immediately, it complains: Try to use a more specific algorithm.
There are 24 [4!] possible ways to define a 3D system [Mathematica].
The most common is Euler though Mathcad Mathcad ≠ Mathematica.
For common use to define some pleasant views, especially in Smath:
1. Euler [ 3 trig angles]
2. Parametric [X,Y,Z,t] very easy to manage.
3. Quaternion only two coefficients that Quaternion solves for the 3D γ matrix
Rotate Horn.sm (15,07 КиБ) скачан 1340 раз(а).
Solve Euler Fails.sm (22,54 КиБ) скачан 1381 раз(а).
Rotate Breather [Euler].sm (37,2 КиБ) скачан 1160 раз(а).
Rotate_0 Euler, xyz(t), Quaternion.sm (275,27 КиБ) скачан 1379 раз(а).
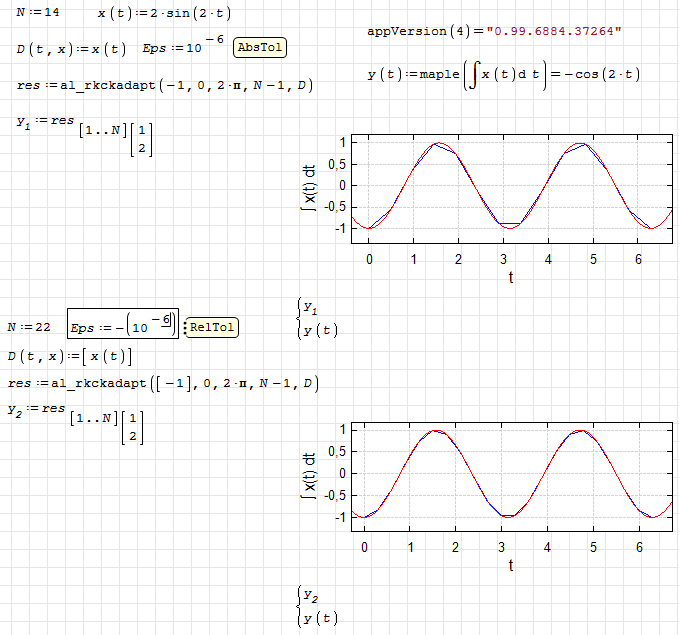
Updated.
Changes for al_rkckadapt():
- zero point issue fixed;
- added support for the simple D(t,x) definition.
Changes for al_rkckadapt():
- zero point issue fixed;
- added support for the simple D(t,x) definition.
Russia ☭ forever, Viacheslav N. Mezentsev
- Новые сообщения
- Нет новых сообщений